GNSS
Podstawowe zasady wyznaczania pozycji z obserwacji GNSS
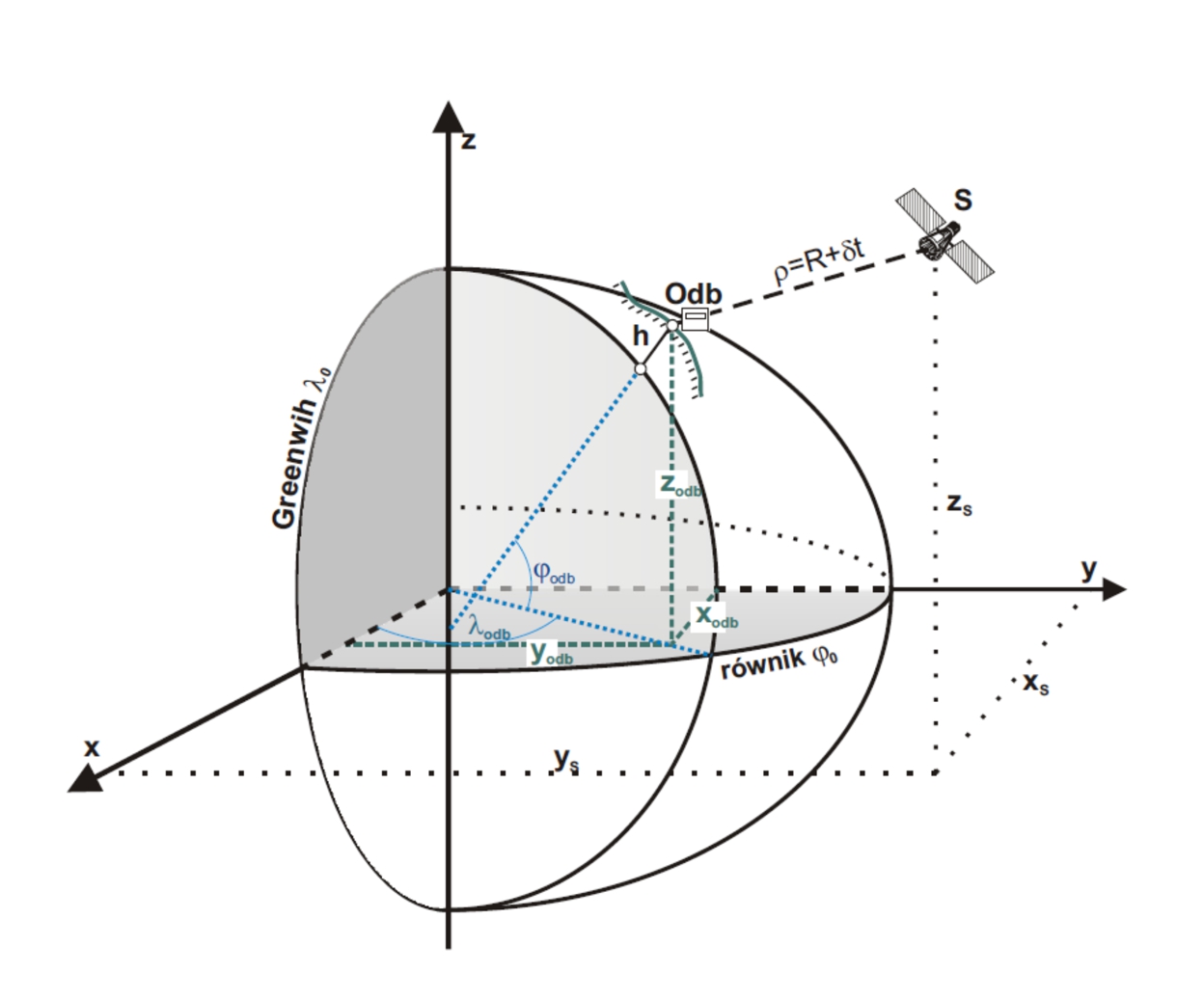
Głównym zadaniem Globalnych Systemów Nawigacji Satelitarnej GNSS (ang. Global Navigation Satellite Systems) jest wyznaczanie pozycji użytkownika. W chwili obecnej do GNSS zalicza się GPS (ang. Global Positioning System) oraz GLONASS (ros. Globalnaia Navigacionnaia Sputnikova Sistema), europejski system Galileo, chiński BeiDou oraz japoński QZSS (Quasi Zenit Satellite System). W dużym uproszczeniu zasada wyznaczania pozycji opiera się na znajomości współrzędnych satelitów w momencie wysyłania sygnału i pomiarze pseudoodległości od satelity do odbiornika. Rysunek przedstawia satelitę i odbiornik systemu GNSS w jednym wspólnym ortokartezjańskim, przestrzennym układzie współrzędnych.
![]()
Zasada wyznaczania pozycji odbiornika GNSS
W równaniu obserwacyjnym pseudoodległości ρ występują trzy niewiadome współrzędne odbiornika xodb, yodb, zodb oraz błąd synchronizacji czasu δt zegara odbiornika z czasem GPS. Wyznaczenie czterech niewiadomych wymaga obserwacji minimum czterech satelitów. Ta zasada, przedstawiona w wielkim uproszczeniu, ma zastosowanie do wyznaczenia pozycji bezwzględnej, której dokładność może nawet osiągać kilkanaście metrów. Osiągnięcie lepszej dokładności pomiarów jest możliwe przez zastosowanie pomiarów różnicowych, w których wyznaczane są przyrosty współrzędnych, i w których znaczna liczba błędów eliminuje się poprzez różnicowanie równań.
Metody precyzyjnego wyznaczania pozycji dotyczą pomiarów różnicowych, w których wykorzystywane są jednoczesne obserwacje odbiornikiem na wyznaczanym punkcie oraz odbiornikiem na punkcie referencyjnym. W zależności od czasu pomiaru na punkcie oraz sposobu opracowania obserwacji, wyróżnia się następujące metody wyznaczania pozycji:
- statyczne,
- szybkie statyczne (FastStatic, Rapid Static),
- w czasie rzeczywistym,
- kinematyczne (RTK, RTN),
- pomiary DGNSS,
- kinematyczne w postprocessingu.
Pomiary statyczne
Pomiary statyczne polegają na jednoczesnym zbieraniu danych GNSS odbiornikami umieszczonymi na wyznaczanych punktach w odpowiednio długim czasie. Stosując programy obliczeniowe obliczane są w tzw. postprocessingu składowe wektorów łączących mierzone punkty. W nawiązaniu do stacji referencyjnych o znanych współrzędnych wyniki pomiarów mogą być wyrównywane i punkty mierzone otrzymują współrzędne. Pomiary statyczne zapewniają najwyższą dokładność pomiarów GNSS. Wykorzystywane są w zakładaniu i kontroli osnów geodezyjnych oraz w badaniach geodynamicznych. Pozwalają one uzyskać, w zależności od długości wektora, następujące dokładności:
- przy użyciu efemeryd pokładowych: ±1 cm + 2 ppm × D dla współrzędnych horyzontalnych i ±2 cm + 2 ppm × D dla wysokości (ppm oznacza część milionową, tj. 1 × 10-6 (ang. part per milion).
- przy użyciu efemeryd precyzyjnych IGS: 10-8 – 10-9 dla wektorów kilkusetkilometrowych.
Szybkie pomiary statyczne
Jest to odmiana pomiarów statycznych, dla których pomiar na wyznaczanym punkcie skrócono do 5–20 minut. Osiągnięto to wprowadzając nowe generacje odbiorników (głównie dwuczęstotliwościowych) oraz udoskonalone algorytmy wyznaczania nieoznaczoności. Zaostrzeniu uległy w stosunku do metody statycznej kryteria pomiaru:
- odbiornik musi ciągle śledzić minimum 5–6 satelitów,
- interwał zliczeń obserwacji wynosi 1–10 sekund,
- minimalna wysokość satelitów nad horyzontem wynosi 15°,
- długość wektorów nie powinna przekraczać 20 km.
Metoda pozwala uzyskać dokładności wyznaczenia punktu na poziomie kilku centymetrów wykorzystując oprogramowanie firmowe.
Pomiary w czasie rzeczywistym
Warunkiem realizacji pomiarów w czasie rzeczywistym jest bezpośrednia łączność między stacją bazową a odbiornikiem ruchomym. Informacje ze stacji bazowej w postaci obserwacji lub poprawek do obserwacji są przesyłane do odbiornika ruchomego, w którym następuje proces opracowania danych i wyznaczenia pozycji.
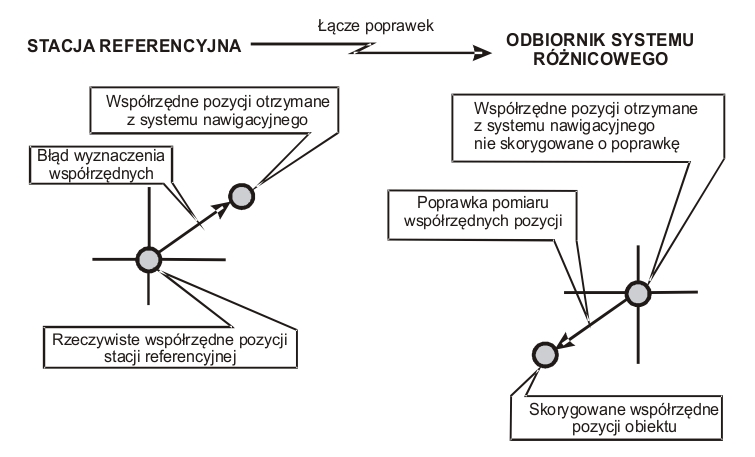
Zasada wyznaczania pozycji w czasie rzeczywistym. (opracowanie własne)
Pomiary RTK (Real Time Kinematic)
Pomiary RTK należą do pomiarów w czasie rzeczywistym. Metoda bazuje na algorytmie inicjalizacji OTF (ang. On The Fly) czyli prawie natychmiastowego rozwiązania nieznanej liczby fal na drodze satelita-odbiornik. Metoda wymaga widoczności minimum 5 satelitów powyżej 15°. Wykorzystywane są obserwacje fazowe odbiornikiem dwuczęstotliwościowym. Zaletą w stosunku do pomiarów statycznych jest natychmiastowe wyznaczenie pozycji, natomiast do wad należy zaliczyć konieczność zapewnienia ciągłej łączności między stacją bazową i odbiornikiem ruchomym oraz ograniczenie zasięgu metody. Typowe warunki pomiarów RTK to:
- inicjalizacja około 1 minuty,
- pomiar pikiety 3–5 sekund,
- zasięg pomiarów do 30 km,
- dokładność ±1–2 cm + 2 ppm × D dla składowych horyzontalnych i około ±3 cm + 2 ppm × D dla składowej wysokościowej.
Pomiary RTK – RTN (powierzchniowe)
W pomiarach powierzchniowych RTK rolę stacji bazowej przejmuje sieć stacji permanentnych tworzących system (np. ASG-EUPOS), przesyłających dane obserwacyjne w czasie rzeczywistym do Centrum Zarządzania Systemu. Oprogramowanie sterujące w Centrum Zarządzania przetwarza dane ze stacji, tworząc albo poprawki powierzchniowe typu FKP (niem. Fläche Korrektur Parameter) lub MAC (ang. Master and Auxiliary Concept), albo obserwacje z Wirtualnej Stacji Referencyjnej (VRS ang. Virtual Reference Station).
Zaletą systemu powierzchniowego RTK jest możliwość pracy z jednym odbiornikiem ruchomym. Rolę stacji bazowej przejmuje na siebie system. Odległości między stacjami według obecnych warunków oprogramowania Centrum Zarządzania mogą wynosić 70–80 km, a otrzymywane dokładność i niezawodność wyznaczenia pozycji jest wyższa niż dla typowych pomiarów RTK.
Pomiary DGNSS
Termin DGNSS odnosi się do metody różnicowych pomiarów satelitarnych. W przypadku prac wykonywanych w czasie rzeczywistym terminu tego używa się w odniesieniu do kodowych pomiarów satelitarnych, w których wyznaczona pozycja, tak jak w pomiarach RTK poprawiana jest na bieżąco o dane korekcyjne.
W odróżnieniu od RTK, DGPS jest prostszą techniką wyznaczania współrzędnych, bazującą przede wszystkim na pomiarach kodowych, tzn. nie istnieje potrzeba wyznaczenia nieoznaczoności (procesu inicjalizacji). Do określenia współrzędnych wystarczają 4 satelity nawigacyjne. Dokładności uzyskiwane tą techniką zależą głównie od odległości od stacji bazowej.
Pomiary kodowe znajdują zastosowanie przede wszystkim w nawigacji, turystyce oraz gromadzeniu danych dla systemów GIS.
Pomiary kinematyczne w postprocessingu
Jest to metoda pomiaru pozycji anteny będącej w ruchu oparta na obliczeniach wykonanych po zakończeniu pomiaru w tzw. postprocessingu. Stosowana jest w przypadkach, gdy metody RTK nie zdają egzaminu, np. przy wyznaczaniu środków rzutów kamery w nalotach fotogrametrycznych.