Opracowanie metody modelowania przestrzeni 3D z wykorzystaniem współczesnych technologii lotniczych i naziemnych kamer cyfrowych
Projekt badawczy statutowy finansowany ze środków Ministerstwa Nauki i Szkolnictwa Wyższego, realizowany w Zakładzie Fotogrametrii w 2009 roku pod kierownictwem dr inż. Ireneusza Ewiaka.
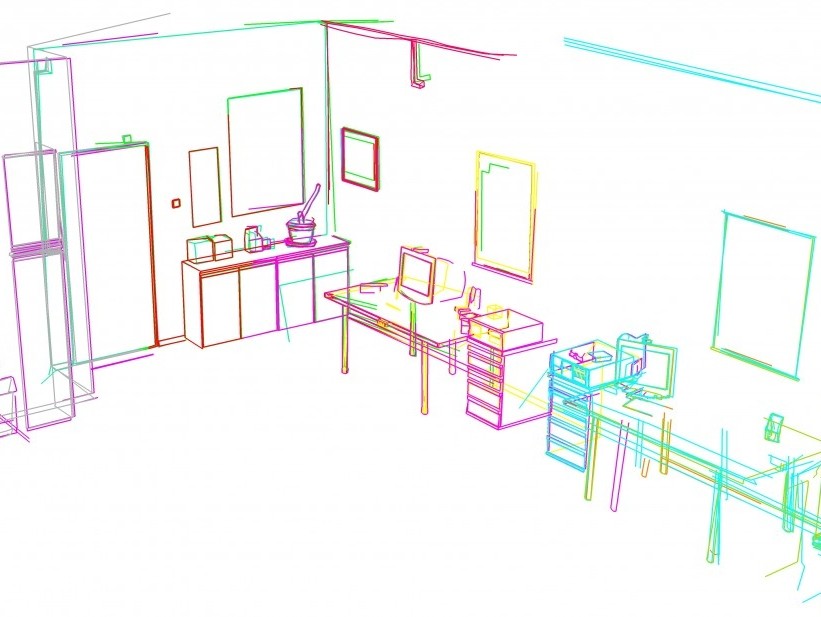
Wobec rosnącego zainteresowania wirtualną mapą przestrzenną łączącą cechy tradycyjnej mapy topograficznej z numerycznym modelem pokrycia terenu w Zakładzie Fotogrametrii podjęta została tematyka badawcza, której celem było opracowanie metodyki modelowania przestrzeni 3D ze szczególnym uwzględnieniem jednego z jej poziomów jaki stanowią budynki. Pierwsza część projektu dotyczyła wykorzystania współczesnych lotniczych kamer cyfrowych do modelowania zewnętrznego budynków, druga zaś odnosiła się do wykorzystania wysokorozdzielczych naziemnych kamer cyfrowych do budowy modeli przestrzennych wnętrz budynków. Do realizacji zadań drugiej części projektu wykorzystano 24-megapikselową kamerę cyfrową Nikon D3X oraz specjalistyczne oprogramowanie zainstalowane na stacji fotogrametrycznej Summit Evolution firmy DATEM. W kamerze wyłączono system automatycznej regulacji ostrości blokując dodatkowo pierścień zmiany ogniskowej. Właściwe pomiary fotogrametryczne poprzedzone zostały kalibracją kamery przeprowadzoną z wykorzystaniem oprogramowania PI-Calib firmy TOPCON oraz testu kalibracji 2D. W ramach realizacji projektu dokonano analizy i wyboru wielkości i kształtu znaczków pomiarowych z uwzględnieniem zmiany skali i orientacji obrazów. Wybrano znaczek pomiarowy w kształcie koła o możliwie największej średnicy oraz największej grubości linii wewnętrznych. W obrębie odtwarzanego wnętrza obiektu zaprojektowano osnowę fotogrametryczną pomierzoną metodami geodezyjnymi z dokładnością 0.4 mm. Wykonano szesnaście par zobrazowań, przy czym w każdym przypadku zadbano o to, aby oś optyczna kamery była skierowana prostopadle do fotografowanego obiektu oraz kamera znajdowała się w tej samej odległości od niego. Orientację wzajemną przeprowadzono z dokładnością poniżej 1 µm. Dokładność orientacji bezwzględnej dla poszczególnych par nie przekroczyła średnio przyjętego błędu granicznego wynoszącego 3 mm. Na podstawie zorientowanych modeli naziemnych obrazów cyfrowych dokonano digitalizacji wszystkich widocznych krawędzi oraz punktów rozproszonych. Wyznaczone zostały grupy punktów leżące współpłaszczyznowo lub współliniowo. Dla odpowiednich grup współzależnych punktów uśredniono wartości współrzędnych płaskich lub wysokościowych w celu zachowania ciągłości i kształtu poszczególnych elementów. Odtworzono również elementy walcowe poprzez wyznaczenie boków przekroju osiowego i promienia podstawy. Stwierdzono, że wykorzystując zależności liniowe i płaszczyznowe punktów pomiarowych możliwe jest odtworzenie niewidocznych części elementów przestrzennych. Podjęta próba autokorelacyjnego pomiaru chmury punktów na obrazach z naziemnej kamery cyfrowej ze względu na ubogą ich teksturę nie dała zadowalających rezultatów. W procesie integracji poszczególnych modeli pochodzących z opracowania kolejnych stereogramów uzyskano wynikowy model przestrzenny wnętrza odtworzony z dokładnością mierzoną błędem średnim położenia na poziomie 1.5 mm.