Integracja fotogrametrycznych technik pomiarowych w procesie tworzenia informatycznego systemu inwentaryzacji infrastruktury dziedzictwa narodowego z uwzględnieniem standardów modelowania przestrzennego

Realizacja niniejszego tematu przewidziana jest na trzy kolejne lata. Rezultatem aktualnych i przyszłych badań będzie informatyczny system inwentaryzacji obiektów dziedzictwa kulturowego i użyteczności publicznej z uwzględnieniem integracji pomiarów opartych na współczesnych technologiach fotogrametrycznych.
W 2012 r. ze względu na znaczne ograniczenia środków na badania statutowe z Ministerstwa Nauki i Szkolnictwa Wyższego udało się zrealizować tylko niektóre z zaplanowanych zadań badawczych. W zakresie autokorelacyjnego pomiaru punktów przestrzennych została opracowana metodyka przetwarzania obrazów pozyskanych niemetryczną kamerą cyfrową zainstalowaną na pokładzie bezzałogowego środka latającego typu „kopter”. Rozpoznane zostały również standardy modelowania przestrzennego infrastruktury dziedzictwa narodowego, a w szczególności struktury standardu CityGML.


Bezzałogowa platforma firmy Robokopter
W 2012 r. Zakład Fotogrametrii brał czynny udział w testowaniu bezzałogowej platformy fotogrametrycznej firmy RoboKopter, którego celem było wytworzenie, optymalnego z punktu widzenia fotogrametrii, narzędzia pomiarowego o dużej funkcjonalności w zakresie inwentaryzacji obiektów dziedzictwa narodowego. Realizowane były badania zmierzające do pełnej automatyzacji procesu pozyskiwania danych fotogrametrycznych z wykorzystaniem wspomnianej platformy. W szczególności badania te dotyczyły planowania nalotu fotogrametrycznego, stabilizacji położenia podwieszenia platformy oraz poprawności rejestracji obrazów oraz ich liniowych i kątowych elementów orientacji zewnętrznej.
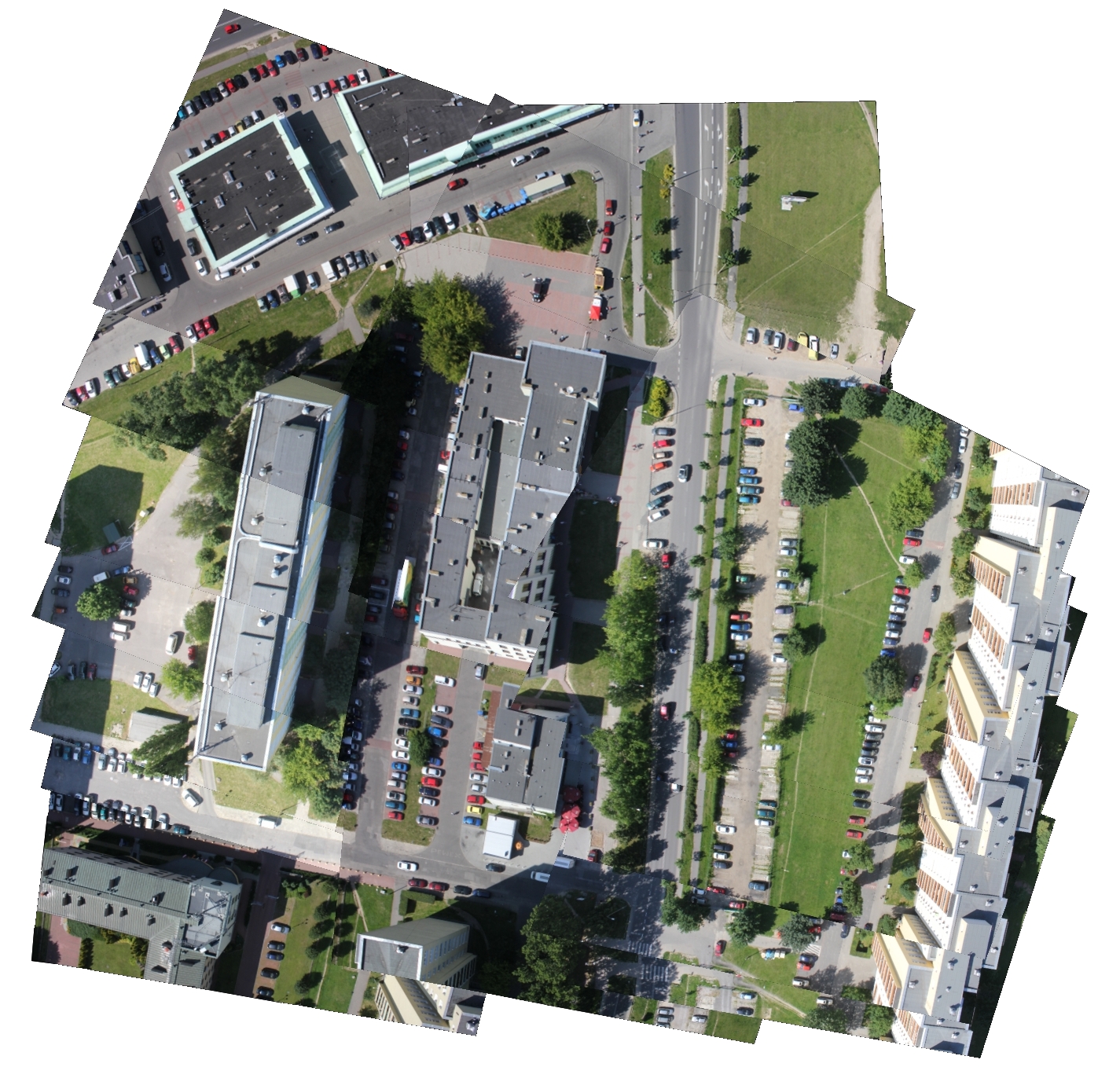
Blok zdjęć wykonany z bezzałogowej platformy
Badania testowe zostały przeprowadzone dla obszaru zurbanizowanego. Nalot fotogrametryczny obejmował blok zdjęć składający się z trzech szeregów, przy pokryciu podłużnym i poprzecznym wynoszącym odpowiednio 70% oraz 50%. Zdjęcia cyfrowe zostały pozyskane z wysokości 200 m z wykorzystaniem kamery Canon EOS 550D wyposażonej matrycę o wymiarach 5185 x 3456 pikseli oraz obiektyw o kalibrowanej odległości obrazowej 19.17 mm. Podstawą oceny jakości tego nalotu były wyniki aerotriangulacj, którą przeprowadzono metodą kombinowaną z wykorzystaniem pomiarów współrzędnych środków rzutów, 332 punktów wiążących oraz 6 fotopunktów.
Stwierdzono, że bezzałogowa platforma RoboKopter na obecnym etapie prac testowych nie spełnia wszystkich wymogów autonomicznego lotu fotogrametrycznego. Dotyczy to w szczególności realizacji projektowanych środków rzutów oraz zbyt dużych wartości kątowych elementów orientacji zewnętrznej poszczególnych obrazów. Stwierdzono, że w oparciu o aktualnie dostępny zestaw pomiarowy platformy RoboKopter można zorientować przestrzennie blok zdjęć z dokładnością charakteryzowaną przeciętnym błędem wyznaczania współrzędnych punktu wiążącego na poziomie mx = 0.29 m, my = 0.26 m oraz mz = 0.64 m.
Wobec uzyskanych rezultatów badań, w Zakładzie Fotogrametrii podejmowane są działania zmierzające do zastąpienia platformy ośmiowirnikowej platformą sześciowirnikową, co spowoduje wydatne wydłużenie długości lotu. Trwają również prace nad modernizacją podwieszenia kamery obrazującej oraz prowadzone są badania przydatności najnowszych modeli lustrzanek cyfrowych do opracowań fotogrametrycznych.